Bir önceki yazımda Servo Motor Kontrolü uygulaması yapmıştık. Bu yazımda Bipolar Step Motor Kontrolü uygulaması gerçekleştireceğiz.
Step motorlar elektriksel palsleri ayrı mekanik hareketlere çeviren araçlardır. Step motorlar terminallerine voltaj uygulandığında dönen DC motorlardan farklı çalışırlar. Step motorlarda ortada mıknatıs veya metalden oluşan rotor ve statoru çevreleyen bobinler vardır. Step motorun rotorunun etrafını çevreleyen bobinlere sürücü devre tarafından sinyaller gönderilir. Böylece yaratılan elektromanyetik etki ile step motor küçük bir dönüş yapar. Diğer sinyalde bir sonraki bobine sinyal verilmesiyle elektromanyetik çekim bu kez de o bobine doğru gerçekleşir ve böylece küçük hareketlerle dönme işlemi sürdürülür. Bu küçük dönüş hareketlerinin her birine bir adım denir.
Step Motorların Avantajları:
- Step motorlar hassas kontrol gerektiren projelerde kullanılır. Çünkü step motorların adımlarındaki hata sayısı düşüktür ve bir adımdaki hata bir sonraki adımı etkilemez.
- Step motorların rotasyon açısı giriş palsi ile orantılıdır.
- Step motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap verirler.
- Dijital olarak kontrol edilebildikleri için bilgisayar kontrollü uygulamalarda kullanılmaya da yatkındırlar.
- Step motorların hızı girş palslerinin frekanslarıyla orantılı olduğundan geniş bir rotasyonel hız aralığına sahiptirler.
Step Motorların Dezavantajları:
- Step motorlarında diğer motorlara göre daha fazla olan titreşim bazı hız değerlerinde tork kayıplarına neden olabilir. Bu titreşimler faz sayısı fazla olan motorlarda faz sayısı az olan motorlara göre daha azdır. Titreşimlerden doğan tork kaybı sorununu çözmek için step motoru titreşim yaratacak hız aralığında çalıştırmamaya özen gösterilmelidir.
- Çok yüksek hızlarda kolaylıkla kontrol edilemezler.
- Step motorlar, DC ve Servo motorlara göre daha karmaşık sürücü devrelere ihtiyaç duyabilirler.
Step Motor Çeşitleri
Sabit Mıknatıslı Step Motorlar (Permanent Magnet Stepper Motors-PM)
Değişken Relüktanslı Step Motorlar (Variable Reluctance Stepper Motors-VR)
Hibrit Step Motorlar (Hybrid Stepper Motors-HB)
İki Fazlı Step Motorlar:
Unipolar Step Motorlar:
Faz başına iki sargı içeren step motorlardır. Bu sargılardan biri akım yönü içindir ve bu sayede manyetik kutuplar, akım yönü değiştirilmeksizin terslenebilir. Bu sayede her sarım için komutasyon devresi çok kolay şekilde (bir transistör ile) yapılabilir. Genelde her sarım için bir uç ortaktır, her faz için de 3 uç vardır. İki fazlık bir step motorda 6 uç bulunur. Sıklıkla bu iki fazın ortak uçları içeride birleştirilir, sonuçta 5 kablo ucu olur.
Bipolar Step Motorlar:
Faz başına tek sargı içeren step motorlardır. Magnetik kutbu terslemek için sarımdaki akımı ters yöne çevirmek gerektiğinden, bipolar step motorların sürücü devreleri unipolarlara göre daha karmaşıktır. Sürücü devre olarak genellikle H köprüsü devreleri kullanılır. Bipolar step motorlarda faz başına iki uç vardır ve ortak uç yoktur. Sarımlar bipolar step motorlarda daha iyi kullanıldığından aynı ağırlığa sahip unipolar ve bipolar step motorlardan bipolar olanın torku daha yüksektir.
Kaynak: http://www.robotiksistem.com/step_motor_cesitleri.html
Gerekli Malzemeler
- Arduino
- Bipolar Stepper Motor
- Motor Sürücü DRV 8825
- Jumper
- 9V pil ya da güç kaynağı (Arduino’yu harici beslemek isterseniz)
Gerekli bilgiyi verdikten sonra kodları yazarak ve Arduino’yu bilgisayara takarak kodumuzu yazalım.
int sleep = 11;
int reset = 10;
int direccion = 9;
int paso = 8;
void setup()
{
pinMode(sleep,OUTPUT);
pinMode(reset,OUTPUT);
pinMode(direccion,OUTPUT);
pinMode(paso,OUTPUT);
pinMode(12,OUTPUT);
digitalWrite(sleep, HIGH);
digitalWrite(reset, HIGH);
digitalWrite(direccion, HIGH);
}
void loop()
{
digitalWrite(12, HIGH);
digitalWrite(paso, HIGH);
delay(100);
digitalWrite(12, LOW);
digitalWrite(paso, LOW);
delay(100);
}
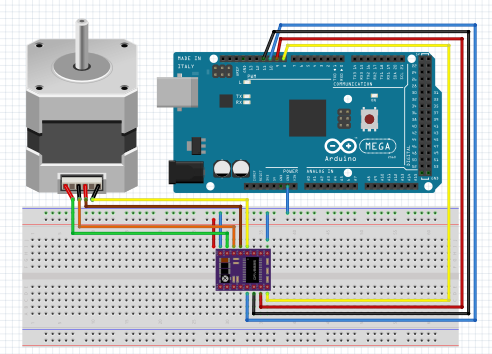
Kodumuzu yazdıktan sonra Arduino’ya yükleyelim. Aşağıdaki gibi bağlantıyı gerçekleştirelim.
Bir sonraki yazımda Mesafe Kontrolü uygulaması gerçekleştireceğiz.